TFRPMMAG01 - Magnetic RPM Sensor with I2C Interface
The TFRPMMAG01 is a compact sensor designed for measuring the RPM of diametrically magnetized rotating parts, primarily in UAV and drone applications. It supports direct connection to Pixhawk-based autopilot systems with PX4 firmware. The high-speed measurement capability and compact design make it a robust solution for UAV propulsion monitoring and general rotary speed sensing.


Features
- Designed for UAVs: Compact round form factor optimized for drone integration
- High-Speed Measurement: Accurate up to 28,000 RPM
- I2C Interface: Simple connection to autopilots and controllers
- Pixhawk Compatibility: Plug-and-play support with PX4 firmware
- High Resolution: 14-bit precision for accurate RPM detection
Where to Buy?
The TFRPMMAG01 is available from ThunderFly s.r.o..
For a quotation or support, contact us at sale@thunderfly.cz.
Technical Specifications
| Parameter | Value | Description |
|---|---|---|
| RPM Measurement Principle | Diametrically magnetized rotating part | Ensures dust-reliable speed detection |
| Max. Operating Speed | 28,000 RPM | High-speed UAV and motor applications |
| Resolution | 14-bit | Provides precise RPM and position data |
| Interface | I2C | Standard 4-pin JST-GH connector |
| I2C Address | 0x40 | Default address, configurable in PX4 |
| Input Voltage | 3.3 – 5 V | Supports common Pixhawk UAV bus voltages |
| Connector | JST-GH 4-pin | Pixhawk standard Pixhawk pinout |
| Dimensions | 18 × 18 × 5 mm | Compact circular PCB |
| Mass | 2 g | Without cable |
Pin Configuration
Interface conforms to the Pixhawk Connector Standard.
| Pin | Name | Type | Description |
|---|---|---|---|
| 1 | VDD | Power | Power supply (3.3–5.5 V) |
| 2 | SCL | Input | Serial Clock Line (I2C) |
| 3 | SDA | I/O | Serial Data Line (I2C) |
| 4 | GND | Ground | Ground connection |
Design and Functionality
The sensor detects RPM by measuring the rotation of a diametrically magnetized part. Its compact design allows for direct mounting in UAV propulsion systems. An indicator LED provides a visual pulse once per revolution, aiding in testing and calibration.
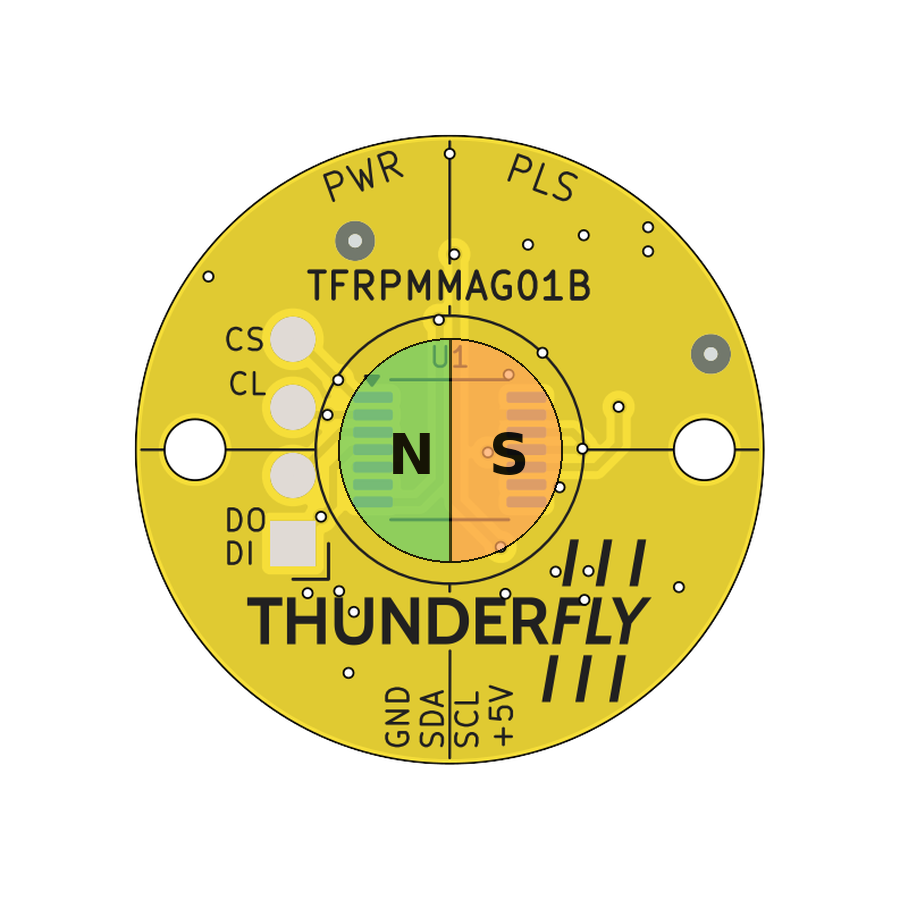
Place a diametrically magnetized disc magnet above the sensing area on the TOP side and keep it centered. Maintain a small axial air gap (< 1 mm) and avoid axial magnetization. Any rotation angle is acceptable; RPM is derived from the change of angle over time.
Dimensions of the sensor follow. The overall thickness is 0.6 mm PCB + 1.2 mm Sensor IC height. Therefore, 1.8mm in total. A 2 mm wide slit is usually a good design in value, which allows manipulation with the sensor during maintenance.
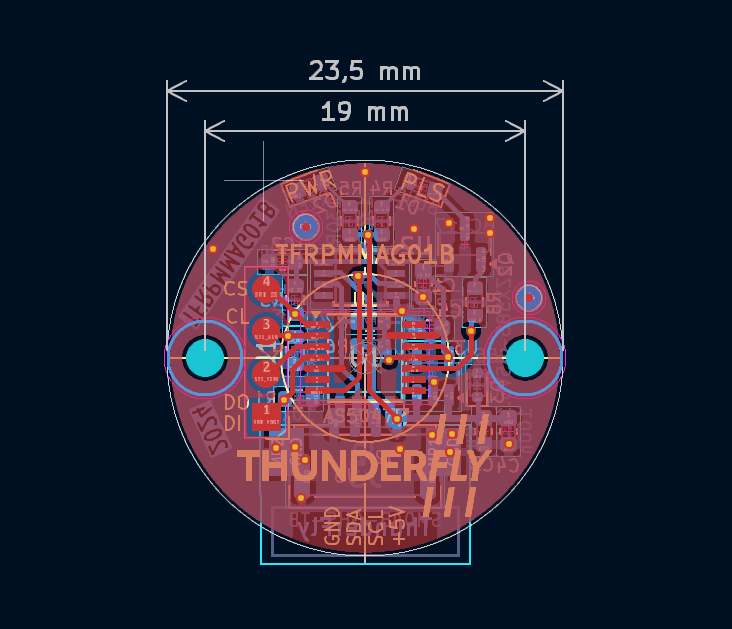
Nominal hole diameter in PCB is 2.2 mm. Acceptable screw head diameter is up to 4.4 mm.
PX4 Autopilot Integration
The PX4 firmware includes support for the TFRPMMAG01. When connected to the I2C bus of a Pixhawk flight controller, it is automatically detected and can be configured through standard PX4 parameters.
Applications
- UAV propulsion monitoring
- RPM measurement in BLDC motor systems
- General-purpose rotary speed sensing